



默认的车模不收费















X20 科幻真3D产品参数 | |
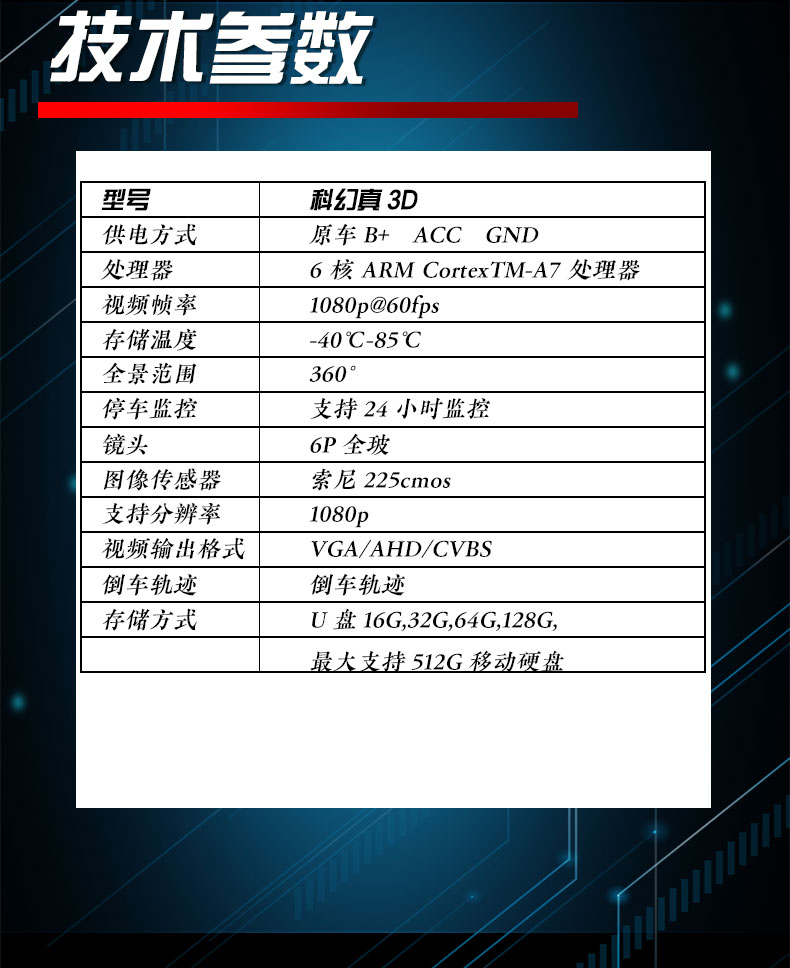
处理器 | ARM Cortex-A7 |
额定电压 | DC 12V |
电压范围 | DC 7--28V |
额定电流 | ≤0.8A@12V |
额定最大工 | ≤1.0A |
静态电流: | ≤0.5mA |
绝缘阻抗 | ≥100MΩ |
工作温度 | -20℃~+70℃ |
存储温度 | -40℃~+85℃ |
视频输入 | AHD(1280x720@25fps)/CVBS |
视频输出 | CVBS/AHD/VGA 三选一 |
摄像头参数 | |
感光芯片 | SONY IMX225 |
有效像素 | PAL:1280*960 |
水平清晰度 | AHD:130W像素960P,模拟:1200线 |
信噪比 | 大于52dB |
最低照度 | 0.001Lux(F1.2) |
工作电压 | DC 12V(±10%)_ |
工作环境 | -40℃-80℃ |
耗电电流 | 小于20W(4个摄像头 ) |
BOSBO博视宝
X20
科幻真3D
产品说明书
目录
1.360主机产品参数
表 1.1 超级真3D 技术参数
板框尺寸 | ARM Cortex-A7 |
额定电压 | DC 12V |
电压范围 | DC 7--28V |
额定电流 | ≤0.8A@12V |
额定最大工作电流 | ≤1.0A |
静态电流: | ≤0.5mA |
绝缘阻抗 | ≥100MΩ |
工作温度 | -20℃~+70℃ |
存储温度 | -40℃~+85℃ |
视频输入 | AHD(1280x720@25fps)/CVBS |
视频输出 | CVBS/AHD/VGA 三选一 |
2.产品视图

图 1 3D 全景视图模式

图 2 前视超广角全屏模式

图 3 2D 全景+前视带轨迹模式

图 4 前视放大模式

图 5 2D 大环视模式

图 6 后视超广角全屏模式

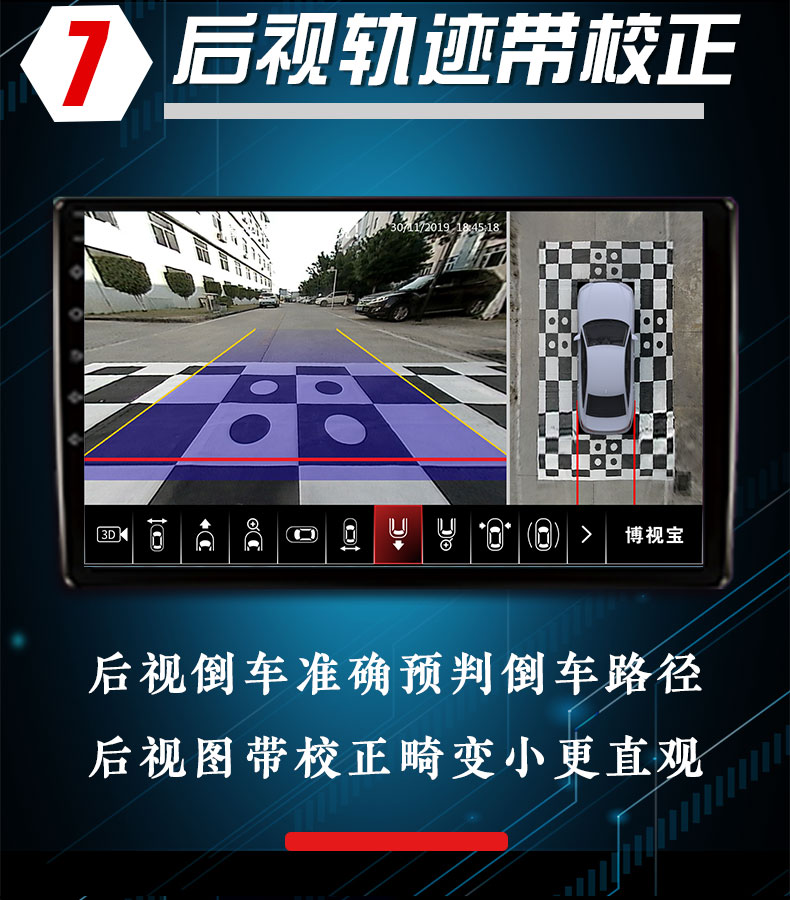
图 7 2D 全景+后视畸变校正加轨迹模式

图 8 后视放大模式

图 9 2D 全景+窄道模式

图 10 2D 过窄道模式

图 11 2D 左视图带畸变校正

图 12 2D 右视图带畸变校正

图 13 进入录像模式

图 14 进入设置模式

图 15 功能菜单模式

图 16 个性化设置模式

图 17 行车记录仪设置模式

图 18 格式化录像磁盘模式

图 19 停车监控设置模式

图 20 系统设置模式

图 21 标定距离设置模式

图 22 系统时间设置模式

图 23 车型设置模式

图 24 显示设置模式

图 25 配置参数导入或导出模式

图 26 版本查看模式
3.产品引脚功能定义
科幻真3D 接口JP5 引脚示意图如图 28 所示:

图 28 JP5 引脚示意图
表 2 JP5 引脚定义说明
引脚名称 | 序号 | 输入/输出 | 引脚定义说明 |
GND | 1 | -- | GND |
RF_ANT | 2 | -- | RF433 天线 |
UART2_TX | 3 | 输出 | 串口 2 TX 输出 |
CAN_IN_L | 4 | 输入/输出 | 输入 CAN L |
UART2_RX | 5 | 输入 | 串口 2 RX 输入 |
CAN_IN_H | 6 | 输入/输出 | 输入 CAN H |
VBAT | 7 | Power | 常电供电输入 |
GND | 8 | -- | GND |
ACC_IN | 9 | 输入 | ACC 检测输入 |
CAN_OUT_L | 10 | 输入/输出 | 输出 CAN L |
GND | 11 | -- | GND |
CAN_OUT_H | 12 | 输入/输出 | 输出 CAN H |
UART3_RX | 13 | 输入 | 串 口 3 输 入 |
UART3_TX | 14 | 输出 | 串口 3 输出 |
5V | 15 | -- | 5V 供电输出 |
空 | 16 | -- | 空 |
科幻真3D 接口JP4 引脚示意图如图 29 所示:

图 29 JP4 引脚示意图表 3 JP4 引脚定义说明
引脚名称 | 序号 | 输入/输出 | 引脚定义说明 |
CAM _F_GND | 1 | 输入 | 前视摄像头输入 |
CAM _F_ VIDEO | 3 | ||
CAM _F_VCC | 5 | ||
CAM _R_GND | 2 | 输入 | 右视摄像头输入 |
CAM _R_VIDEO | 4 | ||
CAM _R_VCC | 6 | ||
空 | 7 | -- | 空 |
RIGHT_LIGHT | 8 | 输入 | 右转向灯输入 |
CAM _B _GND | 9 | 输入 | 后视摄像头输入 |
CAM _B_ VIDEO | 11 | ||
CAM _B_VCC | 13 | ||
CAM _L_ GND | 10 | 输入 | 左视摄像头输入 |
CAM _L_ VIDEO | 12 | ||
CAM _L_VCC | 14 | ||
REVERSE_LIGHT | 15 | 输入 | 倒车灯输入 |
LEFT_LIGHT | 16 | 输入 | 左转向灯输入 |
AHD_OUT | 17 | 输出 | AHD 输出引脚 |
DVD_CTL_OUT | 18 | 输出 | AHD 和 CVBS 控制输出 |
CVBS_GND/AHD_GND | 19 | -- | GND |
CVBS_OUT | 20 | 输出 | CVBS 输出引脚 |
USB_OTG_DP | 21 | -- | USB OTG |
USB_OTG_GND | 22 | ||
USB_OTG_DM | 23 | ||
5V_USB_OTG | 24 |
科幻真3D 接口JP6 引脚示意图如图 30 所示:

图 30 JP6 引脚示意图
表 4 JP6 引脚定义说明
引脚名称 | 序号 | 输入/输出 | 引脚定义说明 |
VGA_R | 1 | 输出 | VGA 红色通道输出 |
VGA_VS | 2 | 输出 | VGA 垂直同步信号 |
VGA_G | 3 | 输出 | VGA 绿色通道输出 |
VGA_HS | 4 | 输出 | VGA 行同步信号 |
VGA_B | 5 | 输出 | VGA 蓝色通道输出 |
GND | 6 | -- | GND |
4.产品安装指南
安装前准备工具:
(拆车工具,车内保护工具、360全景主机摄像头配件)
安装步骤:
1.拆卸中控台
2.安装前后左右摄像头
左右摄像头安装(拆卸左右门板,确定左右摄像头安装位置,拆卸镜片,钻孔,安装摄像头,专用外壳无需打孔,穿线,后视镜复位,万能表找到转向灯正极,连接触发线,左右门板布延长线,还原门板和镜片);后摄像头安装(打开后备箱,拆卸装饰板,取出牌照灯,安装后视摄像头,连接触发线和倒车灯线正极,连接后视延长线,布线);前视摄像头安装(打开引擎盖,安装前摄像头,连接延长线,布线,避开高温区域)
3.安装主机
主机安装到副驾驶的手套箱内,把主机上相应接口的线束连接好。安装基本完成,等待后期拼接。安装环境应选择宽敞明亮之处,避免强光下操作,反光的话会影响拼接效果。

通用摄像头安装:
360全景产品需要安装前后左右四个摄像头,前摄像头一般安装在汽车中网处,尽量居中;后摄像头头安装于后车门把手处附近; 左、右摄像头分别安装于左、右后视镜底部。

主机安装:
360全景主机安装在副驾驶的手套箱内,这样便于后期查看录像和系统维护升级。

5.产品接线指南
本产品分三种信号输出格式:01.VGA信号输出(加解码器)、02.CVBS信号输出、03.AHD信号输出。对应每一种的接线图不一样,请仔细阅读下面图文,进行接线
主机线束插头定义
主机定义

摄像头总线

电源总线

VGA总线

协议OBD线

电源转接线

3种信号输出接线实拍
01、VGA信号输出(加解码器) 接线实拍

02、CVBS信号输出(内置协议) 接线实拍

03、AHD信号输出(内置协议) 接线实拍

6.产品拼接指南
拼接分两步走:
01.铺布
02.标定
铺布
将标定布铺在车身前后左右,如下图:

前、左、右标定布已经缝在一起,只需要铺正即可,注意尾部左右布和后布交接位置的距离指示线,有0.8米、1米、1.2米、1.4米、1.6米、1.8米等,需要根据车身长度来决定后布铺在哪条指示线上。

如上图所示,几个要点需要注意
1、针对前后,摄像头看到的图像与车身之间无空隙,且不挡住上面的黑白棋盘格交叉点;
2、针对左右,摄像头应看到部分车身,注意车身不能看太多,也不能看太少,如果车身看太多了,外面视野会太少,影响3D效果。如果车身看太少了,过窄道和限宽模式看不到车身。同时,上图中A、B两点应尽可能相同,即车头车尾看的差不多,尽量避免某头翘起来;
3、左右两侧标定布与车身间距尽量相同。
标定
铺好布后,在360的系统设置 标定 菜单,根据后布与左右交接位置的实际位置,选择对应的距离,进入标定


按下标定键,进入四合一画面,前面铺布时也可以进入此画面,用于调节布位置和摄像头角度。

在四合一画面,按下遥控器或者点击屏幕(支持触摸协议时),将开始自动标定,全程无所人工干预:

约10~20秒左右后,界面将提示标定成功或标定失败,若标定成功,则会3秒后自动重启,若失败,则提示哪个摄像头标定失败,需要将失败原因排除后重新标定。

铺标定失败原因
铺布或摄像头安装不佳,外部环境过暗

布的位置过于远,导致布与车身之间存在明显间隙

镜头角度安装位置过近,导致遮住了棋盘格黑白交叉点

左右镜头角度不对,导致画面中布是歪的

外部环境太暗,导致系统无法识别黑白棋盘格
7.旋钮激活与使用
主机通电后,全景画面不显示,按旋钮也没反应,此时需要对旋钮进行激活
遥控器激活
【在操作前请确保主机已通电】
激活操作步骤如下:
Step1:底部推出后盖,取出电池(如下图所示)

Step2:按住按钮, 装上电池,等待3s后再松开,激活成功(如下图所示)

Step3:推上后盖,即可使用(如下图所示)

遥控器使用
短按:OK/返回(全景显示界面)
长按:返回(菜单设置界面)
左旋:向左选择
右旋:向右选择

01
车模升级指导:
升级文件下载:
X20老版本车模
链接: https://pan.baidu.com/s/1VAHQG-lNETqhIDcMwp7fUg
提取码:q9mx
X20新版本车模
新版本车模
链接:https://pan.baidu.com/s/1lRIJpXx6-ur7r0mN1PkOKQ
提取码:T7T7
升级步骤说明:

02
系统升级指导:
升级文件下载:
请根据售后工程师的建议,下载对应版本的升级包,拷贝到U盘升级。
链接:https://pan.baidu.com/s/1wIGXZssGgGeH5073Kcb65Q
提取码:20XT
升级步骤说明:
